

Resumen
Objetivos: Demostrar que la cirugía robótica beneficia la ergonomía del cirujano y su ayudante en comparación con la laparoscopia convencional mediante una encuesta de ergonomía y satisfacción.
Métodos: Estudio observacional transversal de las cirugías ginecológicas consecutivas, que implicaban al menos una histerectomía, realizadas con asistencia robótica (Sistema Da Vinci) o con laparoscopia convencional en el Hospital Clínico San Carlos durante los años 2008 y 2021. Se administró al terminar la cirugía robótica o laparoscopia un cuestionario al cirujano principal y al asistente con el fin de conocer sus impresiones subjetivas respecto al confort, ergonomía y satisfacción. Las respuestas se recogieron mediante una escala visual analógica que puntuaba del 1 (peor condición) al 10 (mejor condición). Se realizó la comparación de las variables usando el test t de Student o el test de Mann-Whitney U test para muestras independientes. La significación se consideró con un valor de p<0.05.
Resultados: En 384 de un total de 451 (85.1%) procedimientos se obtuvo una respuesta completa al cuestionario (242 robóticas y 142 laparoscópicas). A igualdad de dificultad percibida por el cirujano principal, la cirugía robótica fue valorada como menos cansada, con más confort y con menor dolor de miembros y espalda que la laparoscópica (p<0.001). El cirujano considero que la visión 3D, la articulación del instrumento y la ergonomía que ofrece la robótica eran relevantes, así como que la robótica era un avance frente a la laparoscopia y la cirugía abierta independientemente del nivel de experiencia o de la complejidad del procedimiento. En relación con el cirujano ayudante no se encontraron diferencias en entre la cirugía robótica y la laparoscópica, salvo cuando el ayudante era senior que encontraba en la robótica mejor grado de confort y menor dolor de miembros (p<0.05)
Conclusiones: La cirugía robótica tiene claras ventajas para el cirujano, ya que aumenta el grado de satisfacción y confort, disminuyendo el cansancio y las molestias por la posición en comparación con la laparoscopia convencional y es independiente de la experiencia del cirujano y la complejidad de la intervención.Abstract
Objectives: To demonstrate that robotic surgery benefits the ergonomics of the surgeon and his assistant compared to conventional laparoscopy through an ergonomics and satisfaction survey.
Methods: Cross-sectional observational study of consecutive gynecological surgeries, which involve at least one hysterectomy, performed with robotic assistance (Da Vinci System) or with conventional laparoscopy at the Hospital Clínico San Carlos during the years 2008 and 2021. A questionnaire was administered to the main surgeon and the assistant in order to know their subjective impressions regarding comfort, ergonomics, and satisfaction with the da Vinci robotic system or laparoscopy. The responses were collected using a visual analog scale that scored from 1 (worst condition) to 10 (best condition). The comparison of the variables was made using the Student’s t test or the Mann-Whitney U test for independent samples. Significance was considered with a value of p<0.05.
Results: A complete response to the questionnaire was obtained in 384 out of 451 cases (242 robotic and 142 laparoscopic). With equal difficulty perceived by the main surgeon, robotic surgery was rated as less tiring, more comfortable, and with less limb and back pain than laparoscopic surgery (p<0.001). The surgeon considered that the 3D vision, the articulation of the instrument and the ergonomics offered by robotics were relevant, as well as that robotics, was an advance over laparoscopy and open surgery regardless of the level of experience or the complexity of the procedure. No differences were found between robotic and laparoscopic surgery in the assistant assessment, except when the assistant was a senior surgeon, who found a better degree of comfort and less limb pain in the robotic approach (p<0.05).
Conclusions: Robotic surgery has clear advantages for the surgeon, since it increases the degree of satisfaction and comfort, reducing fatigue and discomfort due to the position compared to conventional laparoscopy regardless surgeon’s experience and complexity of the intervention.Palabras clave: Cirugía robótica; Laparoscopia; Ginecología; Ergonomía; Satisfacción; Cirugía mínimamente invasiva.
Keywords: Robotic surgery; Laparoscopy; Gynecology; Ergonomy; Satisfaction; Minimally invasive surgery.
INTRODUCCIÓN
Aproximadamente un 90% de los ginecólogos que realizan cirugía mínimamente invasiva experimentan dolor o molestias físicas en algún momento durante el acto quirúrgico. Entre un 10-30% de los ginecólogos requieren tratamiento para el dolor o han tenido que limitar su actividad quirúrgica en alguna ocasión (1).
Las lesiones musculoesqueléticas se presentan la mayoría asociadas a la práctica de la cirugía laparoscópica con tasas entre el 73% y el 100%, seguida de la cirugía laparotómica entre el 66% y el 94%, la cirugía vaginal entre el 54% y el 87% y la cirugía robótica entre el 23% y el 80% (2).
Una de las principales ventajas de la cirugía robótica es la mejora de la ergonomía. La ergonomía se define como la optimización del entorno físico para mejorar el rendimiento laboral (3).
El sistema quirúrgico da Vinci consta de 3 elementos principales: la consola del cirujano, el carro del paciente y la torre de visión. Pero a pesar de que la consola del cirujano se puede adaptar a las características físicas del cirujano, hasta un 25% continúan adoptando posturas que ponen en riesgo la ergonomía y derivan en dolor y riesgo de lesiones (4).
La mayoría de los estudios ponen de manifiesto que la cirugía robótica es físicamente menos demandante que la laparoscopia en la sutura y práctica de nudos. Así como la mayoría de los autores reportan incidencias más bajas en cuanto a las molestias físicas relacionadas con la cirugía robótica comparada con la laparoscopia o la cirugía abierta (5,6,7) . Pero a pesar de estos datos favorables, los cirujanos ginecológicos deberían aprovechar la oportunidad que ofrece la consola del sistema robótico da Vinci para adaptarla a sus características físicas y de esta forma optimizar al máximo la postura para minimizar las molestias musculoesqueléticas. Siendo importante incluir estos aspectos en la formación de los cirujanos que se inician en cirugía asistida por robot (8).
Mientras los resultados clínicos pueden ser objetivamente cuantificados, la ergonomía del cirujano sigue siendo una entidad difícil de comparar. El objetivo de nuestro estudio es demostrar que la cirugía robótica beneficia la ergonomía y satisfacción del cirujano y su ayudante en comparación con la laparoscopia convencional. Para ello se ha diseñado una encuesta “ad hoc” que ambos rellenaban al finalizar cada intervención.
MATERIAL Y MÉTODOS
Se realizó un estudio observacional transversal de los casos consecutivos intervenidos con asistencia del sistema robótico quirúrgico da Vinci o con laparoscopia convencional por el mismo equipo quirúrgico en el Hospital Clínico San Carlos de Madrid, España entre febrero de 2012 y diciembre de 2021.
Al finalizar la intervención, se administró al cirujano principal y al asistente un cuestionario elaborado “ad hoc” para este estudio con el fin de conocer sus impresiones subjetivas respecto al confort, ergonomía y satisfacción con el sistema robótico da Vinci o la laparoscopia. El cuestionario constaba de 2 partes: una relacionada con la dificultad, el grado de confort y molestias durante el procedimiento quirúrgico y otra que medía la satisfacción concreta cuando se utilizaba el sistema robótico en relación con otras vías de abordaje quirúrgico. Las respuestas se recogían en una escala visual analógica que puntuaba del 1 al 10, donde 1 indicaba el más bajo valor y el 10 el valor más alto posible relacionado con la pregunta.
El sistema robótico da Vinci estándar fue adquirido en 2007 y se utilizó hasta su cambio en el marzo de 2015 por el último modelo da Vinci Xi. Todas las cirugías fueron realizadas por el mismo equipo compuesto por cuatro cirujanos experimentados en abordajes robóticos y laparoscópicos (cirujanos senior, con más de 50 intervenciones) y cuatro cirujanos con menos experiencia (cirujanos junior, con menos de 50 intervenciones o en su inicio robótico). El número de cirujanos durante las cirugías fue de 2 (ocasional 3 con asistencia de un residente) en la cirugía robótica y 3 cirujanos en la laparoscópica convencional, siendo al menos uno de ellos residente con misión de llevar la cámara. La combinación de cirujanos siempre incluía al menos un cirujano senior en cualquier vía.
El abordaje quirúrgico (robótico o laparoscópico) fue seleccionado dependiendo de la disponibilidad del sistema quirúrgico robótico (una vez por semana) y no de acuerdo con las características de los pacientes, ni cirujanos. En general, ante la presencia de casos simultáneos se eligió el sistema robótico en los casos más complejos.
Se incluyeron en el estudio los casos de patología ginecológica maligna o benigna que implicaban la realización de al menos una histerectomía (con o sin anexectomía), la cual podría estar asociada o no a la realización de otros procedimientos como linfadenectomía pélvica y/o paraaórtica u omentectomía. Todas las pacientes intervenidas tuvieron indicación de cirugía mínimamente invasiva y firmaron un consentimiento informado.
Se categorizó la complejidad quirúrgica según el tipo de cirugía. Se consideró complejidad baja si el procedimiento implicaba solo una histerectomía con o sin resección de anejos; moderada si la histerectomía se acompañaba de linfadenectomía pélvica; o alta si se asociaba una linfadenectomía paraaórtica o se trataba de una histerectomía radical (tipo B o C de Querleu Moreau)
Todos los procedimientos se realizaron en posición de litotomía. No se usó movilizador uterino en ningún caso. El acceso a la cavidad abdominal se realizó con trocar periumbilical de Hasson. La presión del neumoperitoneo fue aproximadamente 10-12 mm Hg. Para introducir los trocares accesorios, los pacientes se colocaron en la posición de Trendelenburg. Se usaron de forma sistemática 4 puertos de trabajo en semiarco, de 8 mm en el caso de cirugía robótica y de 5 mm en el caso de laparoscopia. En caso de realizar una linfadenectomía paraaórtica se usaron 2 trócares más, uno de 10-12 mm para la óptica suprapúbico (en el modelo Xi se usó un trocar robótico de 8 mm) y un tocar auxiliar de 5 mm en el lado derecho. Se realizó una omentectomía cuando estaba indicado según las guías locales e internacionales. El cierre del manguito vaginal se realizó de forma robótica o laparoscópica con suturas continuas. En los primeros años las suturas fueron de Vicryl 2.0 y desde el 2019 con V-Lock o Stratafix 2/0 o 3/0.
El tiempo operatorio piel con piel fue obtenido contando los minutos desde la incisión en la piel hasta su cierre.
El estudio fue aprobado el 8 de febrero de 2012 por el comité ético local del centro con el código C.P. ROBOCOG – C.I. 12/035-E.
Análisis estadístico
Las variables cualitativas se expresan con sus frecuencias y porcentajes relativos y su relación entre ellas y la vía de abordaje (robótica vs. laparoscópica) se analizó mediante el test de la Chi2 o la prueba exacta de Fisher en caso de que más del 25% de los esperados fueron menos de 5. Las variables cualitativas se expresan con sus medias y desviaciones estándar. Para comparar la vía de abordaje con las variables cualitativas se utilizó la prueba t de Student la prueba U de Mann-Whitney para muestras independientes, dependiendo de la distribución paramétrica o no de la variable continua. Para todas las pruebas, un valor p menor de 0,05 se consideró estadísticamente significativo. El procesamiento y análisis de los datos se llevó a cabo utilizando el software estadístico IBM SPSS versión 25.0.
RESULTADOS
Se analizaron un total de 608 cirugías mínimamente invasivas (robóticas o laparoscópicas). Se seleccionaron 451 casos que presentaban histerectomía y en 384 casos (85.1%) se obtuvo completo el cuestionario (242 robóticas y 142 laparoscópicas)
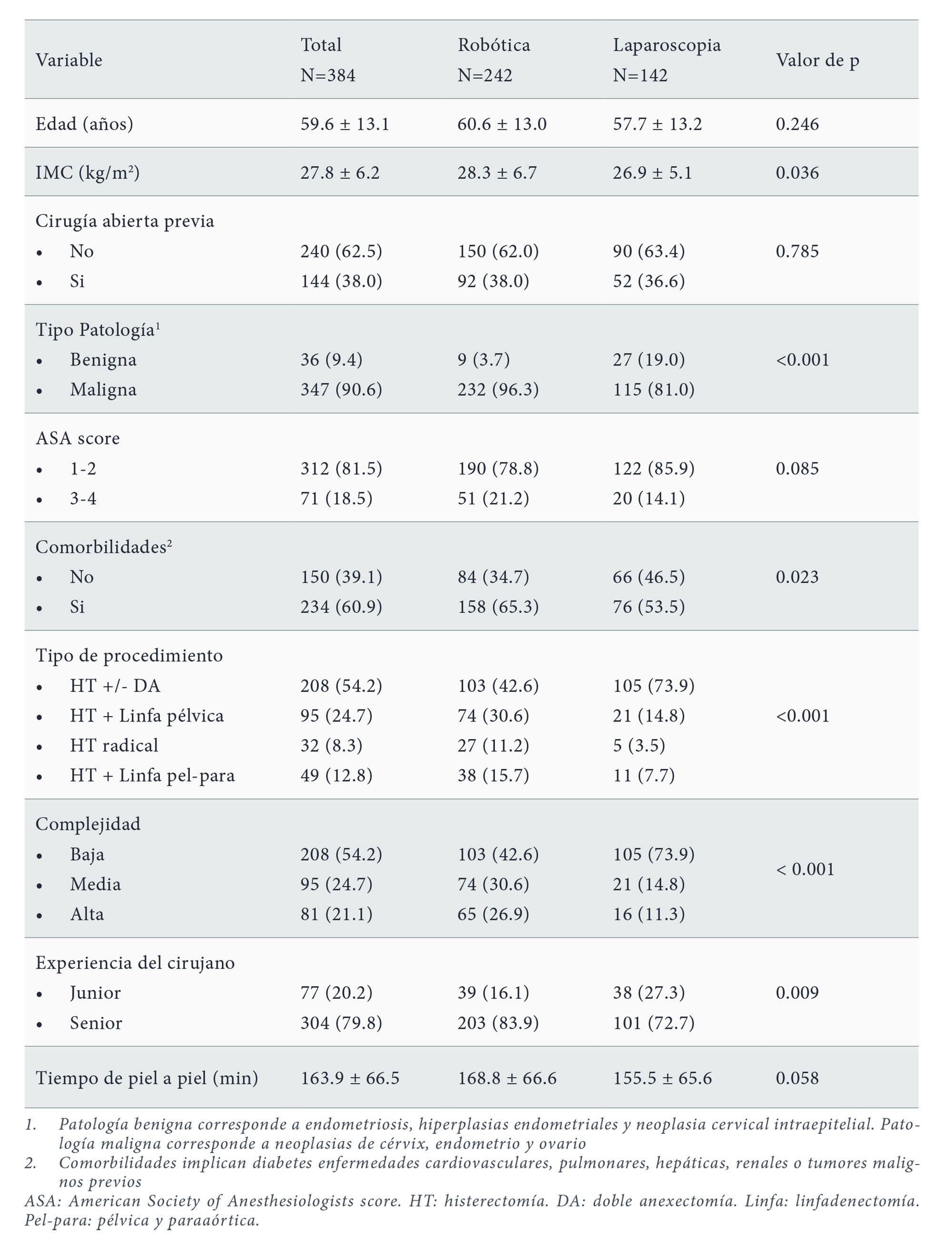
En la tabla 1 se muestra la descripción de la serie. La cirugía robótica se realizó en mujeres más obesas (p=0.036) y con más comorbilidades (p=0.023). Se realizó robótica con más frecuencia en procesos malignos (estadificación y tratamiento de tumores de cérvix, endometrio y ovario), lo que implicó la mayor realización de procedimientos complejos; concretamente con cirugía robótica se realizaron más histerectomías radicales y más histerectomías asociadas a linfadenectomías pélvicas y paraaórticas (p<0.001). Esto refleja un tiempo de cirugía ligeramente superior en los procedimientos robóticos que en los laparoscópicos (diferencia de medias de 13 minutos no significativa). Por otro lado, los procedimientos robóticos se realizaron más frecuentemente por cirujanos senior y los laparoscópicos por junior (p=0.009).
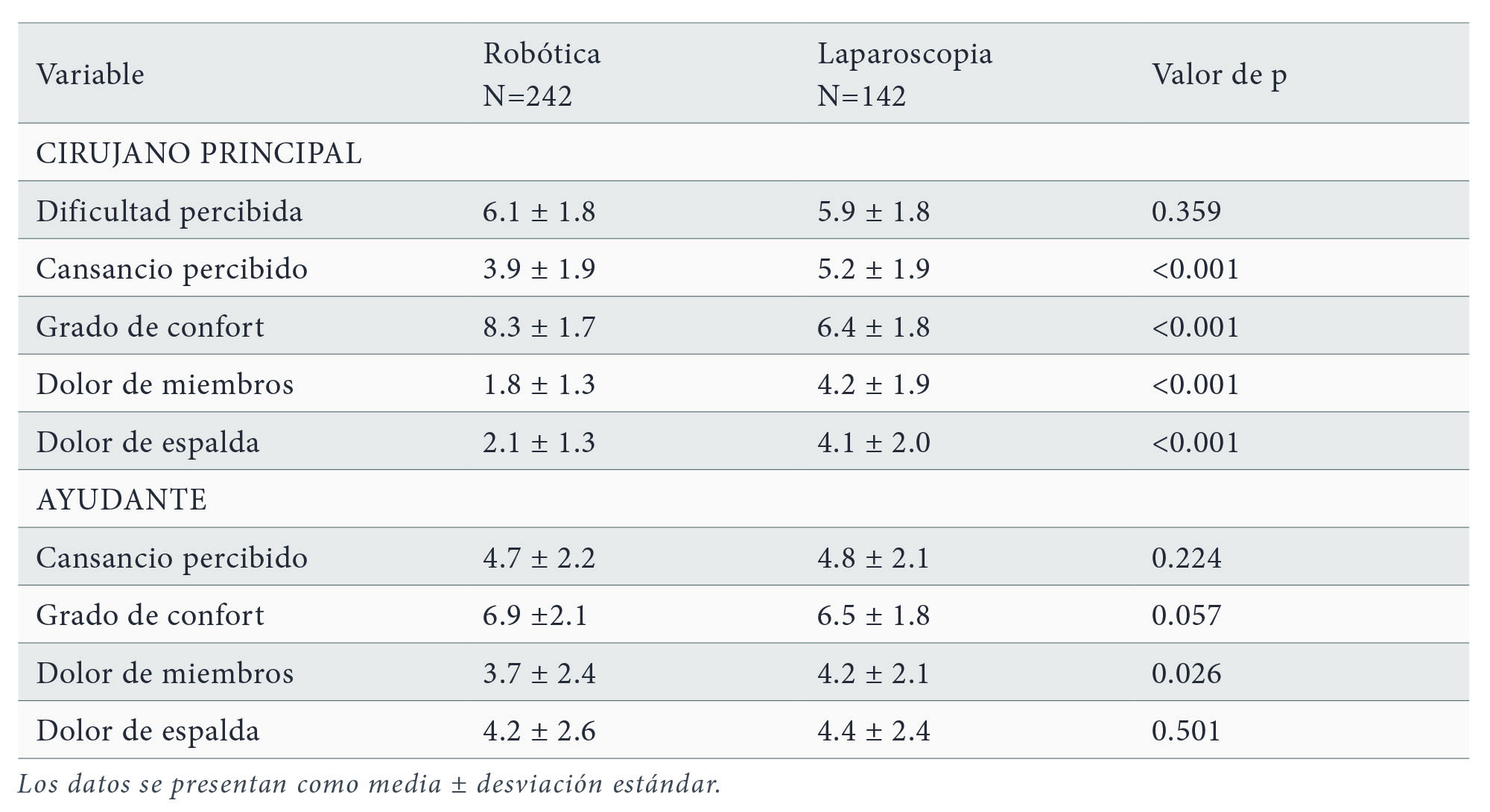
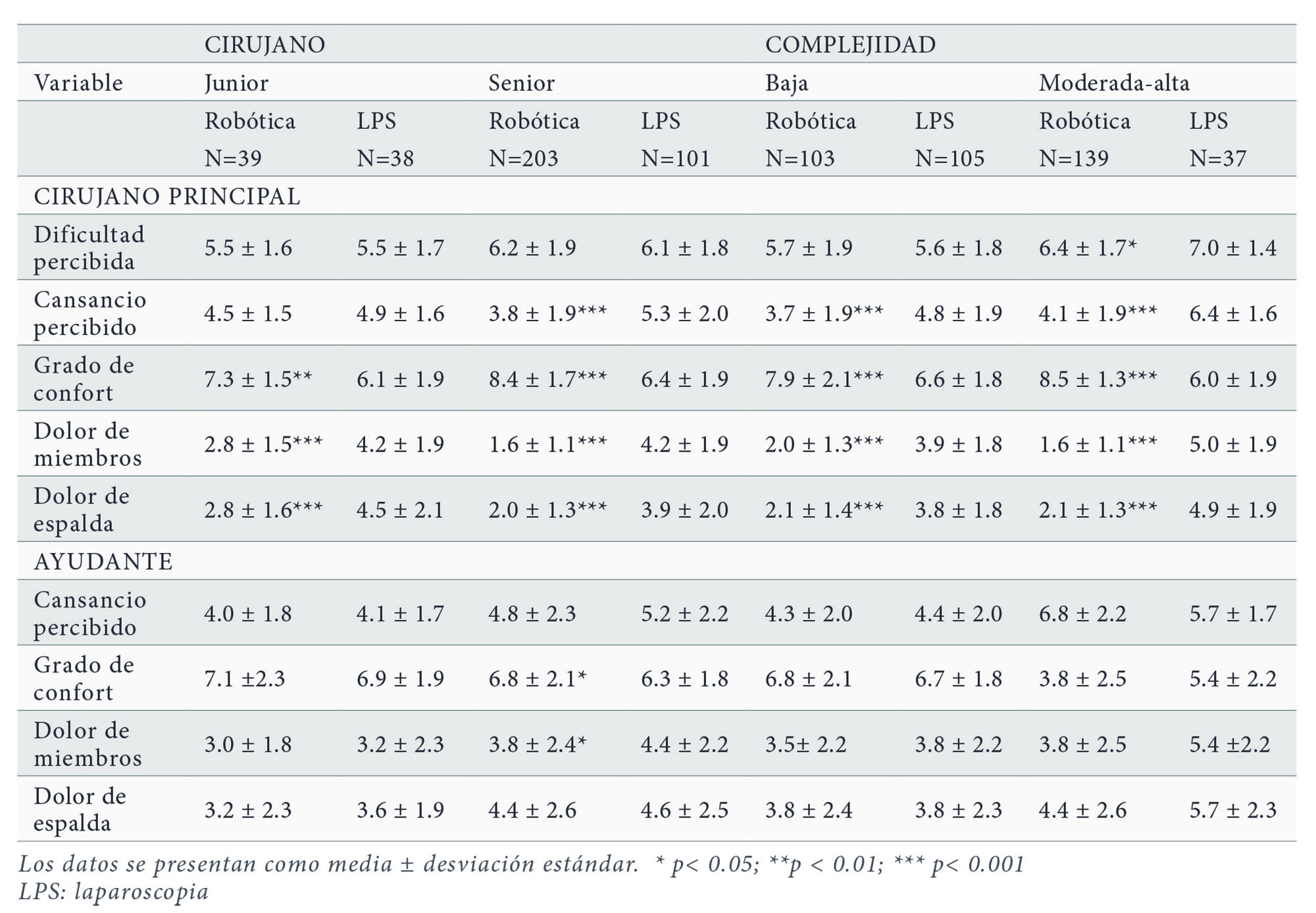
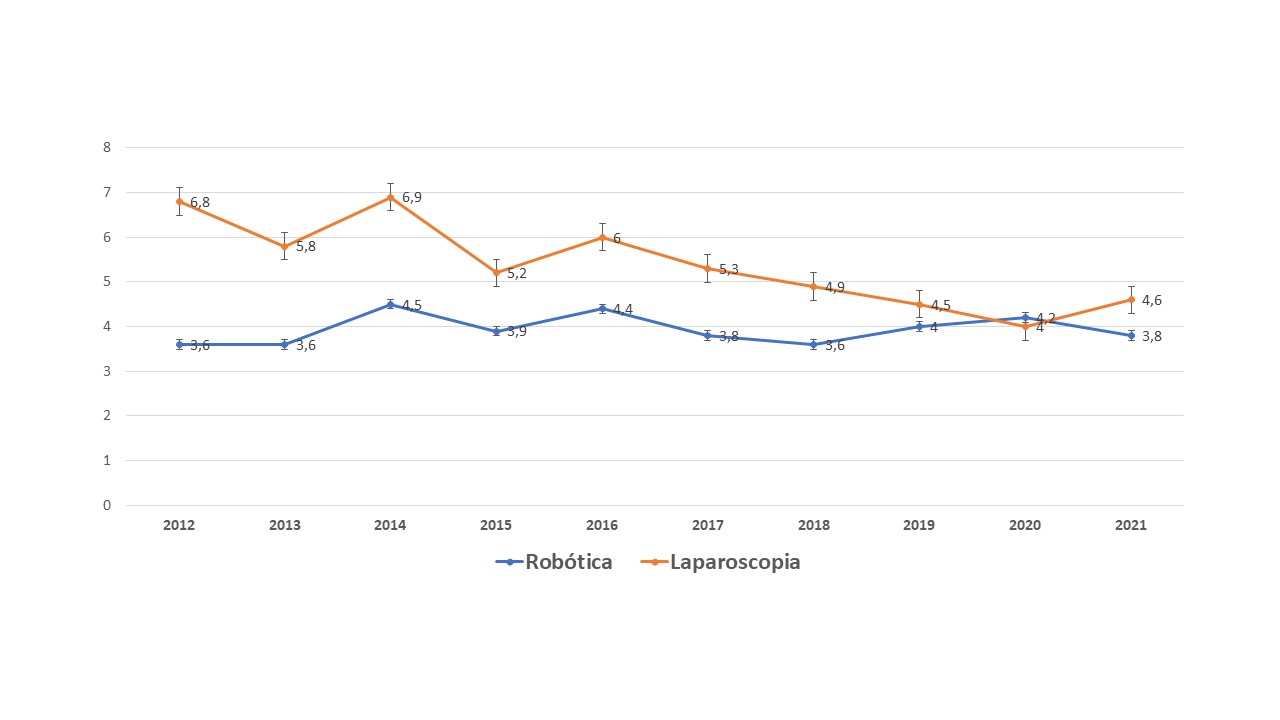
En las tablas 2 y 3 se exponen los resultados de la encuesta realizada a los cirujanos tras finalizar la intervención. A igualdad de dificultad percibida por el cirujano principal, la cirugía robótica fue valorada como menos cansada, con más confort y con menor dolor de miembros y espalda que la laparoscópica (p<0.001). Estos resultados fueron más sutiles en el cirujano ayudante donde la reducción del dolor de piernas fue la variable más diferencial respecto a la laparoscopia (p=0.026) (tabla 2). Cuando se estratificó por la experiencia del cirujano y la complejidad de la intervención se encontraron las mismas diferencias entre la vía robótica y la laparoscópica (tabla 3). Respecto al cansancio percibido, los cirujanos junior no presentaron diferencias significativas respecto al cansancio percibido entre ambas vías, y lo cirujanos senior encontraron menor dificultad percibida en las intervenciones robóticas de moderada-alta complejidad (p<0.05). Respecto al cirujano ayudante, no se encontraron diferencias entre las vías de bordaje, pero si cuando el ayudante era senior respecto al confort y el dolor de miembros (p<0.05). En la figura 1 se expone la puntuación media del cansancio percibido por el cirujano principal según el año de análisis. Se observa como el cansancio en la vía robótica es estable en el tiempo mientras que la en la laparoscopia el cansancio va remitiendo con la experiencia.
En la tabla 4 se muestra la prueba de satisfacción en la cirugía robótica. Tanto en general, como estratificando por la experiencia del cirujano y la complejidad de la cirugía, la satisfacción con la cirugía robótica fue muy alta en cirujano y ayudante. La puntuación para elegir el sistema robótico para la cirugía se estaba realizando fue de 9 puntos sobre 10. Las puntuaciones fueron algo menores en los cirujanos junior y en las cirugías de baja complejidad. El cirujano considero que la visión 3D, la articulación del instrumento y la ergonomía que ofrece la robótica era relevantes, así como que la robótica era un avance frente a la laparoscopia y la cirugía abierta independientemente del nivel de experiencia o de la complejidad del procedimiento. Por otro lado, la ausencia de tacto del robot no supuso un problema (puntuación < 4) salvo para los cirujanos junior que puntuaron este problema con 5 puntos (p<0.001).

Los ayudantes en la cirugía robótica consideraron que el robot es elegible a la hora de ayudar, tanto comparado con la cirugía laparoscópica como abierta y que es un avance frente a ambas vías. Cuando se preguntó si la ayudantía en la cirugía robótica era mejor, lo cirujanos junior la vieron menos relevante frente a la laparoscopia que los seniors (p<0.05) y menos relevante que la abierta en procedimientos de baja complejidad (p<0.05).
Por otro lado, no es un problema para el ayudante el que el cirujano esté fuera del campo operatorio en global ni estratificando por experiencia del cirujano ni complejidad del procedimiento.
DISCUSIÓN
Los resultados obtenidos en nuestro estudio son similares a los resultados sobre ergonomía y cirugía robótica publicados en la literatura; aunque, tanto los cuestionarios, como algunos de los ítems analizados son diferentes a los llevados a cabo por nuestros cirujanos, por lo que resulta complicado realizar comparaciones objetivas. Uno de los mayores estudios publicados incluyo a 1215 cirujanos de diferentes especialidades y demostró, al igual que en nuestra serie, que a la cirugía robótica se asociaba con menor probabilidad de molestias físicas en comparación con la laparoscopia y la laparotomía (8.3% vs. 55.4% vs. 36.3%, respectivamente; p<0.001). Sin embargo, la cirugía robótica se asoció con mayor prevalencia de dolor ocular o síntomas en los dedos, principalmente el dedo pulgar (9).
En otros estudios centrados en cirugía ginecológica, la cirugía mínimamente invasiva parece estar asociada a mayor tensión por parte de los cirujanos que los procedimientos de otras especialidades (10). Un estudio realizado en 350 ginecólogos de la Sociedad de Ginecología Oncológica (SGO), revelaba que la prevalencia de síntomas físicos fue superior en la robótica (72%), seguido de laparoscopia (57%) y laparotomía (49%). De los síntomas descritos, la rigidez (p=0.037) y la fatiga (p=0.012) fueron los más frecuentes. En el análisis multivalente la cirugía robótica y el sexo femenino fueron predictores significativos de síntomas físicos (11). En el estudio de Craven et al., se concluyó que la tensión y rigidez en la robótica son importantes y destacan la importancia de la formación en ergonomía (12). En nuestro estudio, sin embargo, el cansancio y la fatiga percibidos por el cirujano fueron significativamente menores en el grupo de cirugía robótica, aunque al estratificar por la experiencia del mismo, solo los cirujanos senior presentaron diferencias significativas respecto al cansancio percibido entre ambas vías.
Algunos estudios han comparado ambas vías con herramientas de medida objetiva, midiendo los tiempos de sutura o evaluando mediante electromiografía la fuerza de contracción del músculo. Obteniendo, como sería lógico pensar, tiempos de anudado y sutura más cortos en robótica comparada con la laparoscopia (p<0.001) (13). En los músculos bíceps y deltoides se obtuvieron valores más elevados de contracciones al realizar la sutura laparoscópica (p=0.019); por el contrario, las contracciones del trapecio fuero significativamente superiores en la cirugía robótica mientras se utilizaban los instrumentos de corte (p=0.018) (14). El aumento de la tensión en determinados grupos musculares en robótica se ha atribuido a una flexión prolongada del cuello durante el uso de la consola o en el caso de los dedos o el pulgar, se piensa que puede ser por un incumplimiento de las recomendaciones de posicionamiento3. En nuestra serie, el dolor de miembros y de espalda se redujo de forma significativa cuando los cirujanos realizaban cirugía asistida por robot, observando lo mismo al estratificar por experiencia o dificultad de la cirugía. En el cirujano ayudante, solo el dolor de miembros se vio reducido de forma significativa en el grupo de robótica, siendo similar el dolor de espalda en ambas vías de abordaje.
Con respecto a las características del robot, los cirujanos de nuestro estudio consideraron que la visión 3D, los instrumentos articulados y la mejora de la ergonomía eran los factores más relevantes para elegir la cirugía robótica por encima de la laparoscopia o la cirugía laparotómica, sin influir en este hecho el grado de experiencia o la dificultad del procedimiento quirúrgico.
Conviene destacar también, que la ausencia de tacto no supuso un inconveniente para los cirujanos seniors, pero si, para los cirujanos junior; lo cuales consideraron la falta de sensibilidad háptica un problema significativo de la cirugía robótica en comparación con la laparoscopia.
Otra de las características de la cirugía robótica, que para muchos podría suponer un problema o inconveniente, es que el cirujano esté fuera del campo quirúrgico. Sin embargo, los datos de nuestras encuestas reflejaron que para el ayudante no es un problema que el cirujano se encuentre fuera del campo quirúrgico, ni siquiera en las cirugías de mayor complejidad.
Este estudio tiene algunas Limitaciones, como que no es un estudio aleatorizado, lo que incluye sesgos de selección, ya que la cirugía robótica suele ser realizada por cirujanos más expertos, lo que podría mejorar los resultados en la robótica. Otro sesgo en contra de la robótica es que es usualmente elegible en los casos más complejos y ello puede reducir el impacto observado al compararlo con la laparoscopia. Por otro lado, el estudio tiene algunas ventajas como muestra amplia y un equipo estable de cirujanos con el mismo criterio y formación que evita variabilidad de la multicentricidad.
Existen nuevas plataformas robotizadas en el mercado internacional con similares usos que el sistema robótico da Vinci, son los sistemas robóticos HUGO (Medtronic)® y VERSIUS (CMR)®. Estos nuevos sistemas tienen aún pocos y limitados estudios en procedimientos en ginecología y en ergonomía (15).
CONCLUSIONES
La cirugía robótica tiene claras ventajas para el cirujano comparado con la laparoscopia, ya que el grado de satisfacción, el cansancio, el grado de confort y las molestias por la posición son significativamente menores que cuando se hace una intervención por la laparoscopia y esto se mantiene cuando se estratifica por la experiencia del cirujano y por la complejidad de la intervención. Esto hace que se considere a vía robótica elegible y ventajosa para el tratamiento de la patología ginecológica frente a otras vías quirúrgicas tanto por cirujanos y ayudantes.
DECLARACIÓN DE TRANSPARENCIA
Los autores/as de este artículo declaran no tener ningún tipo de conflicto de intereses respecto a lo expuesto en el presente trabajo.
BIBLIOGRAFÍA
- Franasiak J, Ko EM, Kidd J et al. Physical strain and urgent need for ergonomic training among gynecologic oncologists who perform minimally invasive surgery. Gynecol Oncol. 2012; 126: 437-442.
- Catanzarite T, Tan-Kim J, Whitcomb EL, Menefee S. Ergonomics in surgery: a Review. Female Pelvic Med Reconstr Surg. 2018; 24(1): 1-12.
- Wee IJY, Kuo L-J, Ngu JC-Y. A systematic review of the true benefit of robotic surgery: Ergonomics. Int J Med Robot [Internet]. 2020 ; 16(4): e2113.
- Yu D, Dural C, Morrow MM et al. Intraoperative workload in robotic surgery assessed by wearable motion tracking sensors and questionnaires. Surg Endosc. 2017; 31: 877-886.
- Lee GI, Lee MR, Green I, Allaf M, Marohn MR. Surgeons’ physical discomfort and symptoms during robotic surgery: a comprehensive ergonomic survey study. Surg Endosc. 2017; 31(4): 1697-1706.
- Stefanidis D, Wang F, Korndorffer JR Jr, Dunne JB, Scott DJ. Robotic assistance improves intracorporeal suturing performance and safety in the operating room while decreasing operator workload. Surg Endosc. 2010; 24(2): 377-382.
- Lundon D, Kelly B, Bouchier-Hayes D. Surgeon morbidity: does robot-assisted really cause less trauma to the operator?: an international multiple surgeons’ opinion from experience of over 3.000 cases. J Urol 2012; 1: e614-e615.
- Hokenstad ED, Hallbeck MS, Lowndes BR, Morrow MM, Weaver AL, McGree M, Glaser GE, Occhino JA. Ergonomic robotic console configuration in gynecologic surgery: an interventional study. J Minim Invasive Gynecol. 2021; 28(4): 850-859.
- Plerhoples TA, Hernandez-Boussard T, Wren SM. The aching surgeon: a survey of physical discomfort and symptoms following open, laparoscopic, and robotic surgery. J Robot Surg [Internet]. 2012 ; 6(1): 65-72.
- Lavazzo C, Gkegkes ID. Robotic assisted hysterectomy in obese patients: a systematic review. Arch Gynecol Obstet [Internet]. 2016; 293(6): 1169-1183.
- McDonald ME, Ramirez PT, Munsell MF et al. Physician pain and discomfort during minimally invasive gynecologic cancer surgery. Gynecol Oncol [Internet]. 2014; 134(2): 243-247.
- Craven R, Franasiak J, Mosaly P, Gehrig PA. Ergonomic deficits in robotic gynecologic oncology surgery: a need for intervention. J Minim Invasive Gynecol [Internet]. 2013; 20(5): 648-655.
- Eisenberg D, Vidovszky TJ, Lau J, Guiroy B, Rivas H. Comparison of robotic and laparoendoscopic single-site surgery systems in a suturing and knot tying task. Surg Endosc [Internet]. 2013; 27(9): 3182-3186.
- Zihni AM, Ohu I, Cavallo JA, Ousley J, Cho S, Awad MM. FLS tasks can be used as an ergonomic discriminator between laparoscopic and robotic surgery. Surg Endosc [Internet]. 2014; 28(8): 2459-2465.
- Gueli Alletti S, Chiantera V, Arcuri G, et al. Introducing the New Surgical Robot HUGO™ RAS: System Description and Docking Settings for Gynecological Surgery. Front Oncol. 2022 Jun 9;12:898060. doi: 10.3389/fonc.2022.898060.
ranm tv
Pluvio J. Coronado Martín
Instituto de Salud de la Mujer. Hospital Clinico San Carlos Madrid
C/ Profesor Martín Lagos s/n · 28040 Madrid
Tlf.:+34 913 303 526 | E-Mail: plujcoro@ucm.es
An RANM. 2022;139(03): 294-302
Enviado*: 28.06.22
Revisado: 12.07.22
Aceptado: 20.07.22
* Fecha de lectura en la RANM